分子机器人也称为纳米机器人,是刚刚在2010年3月提出来的一个全新的课题,它可以被用来检测和清除人体内的病毒和癌细胞等。分子机器人的研究分为5个过程,分别是:第0代的“Molecular Spider”;第1代的“Amoeba Robots”;第2代的“Slime Mold Robots”;第3代的“Multi-cellular Robots”;第4代的“Hybrid Molecular Robots”。DNA机器人是第0代和第1代分子机器人。
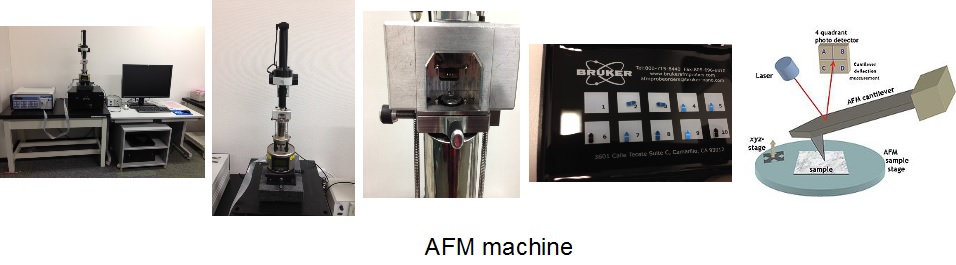
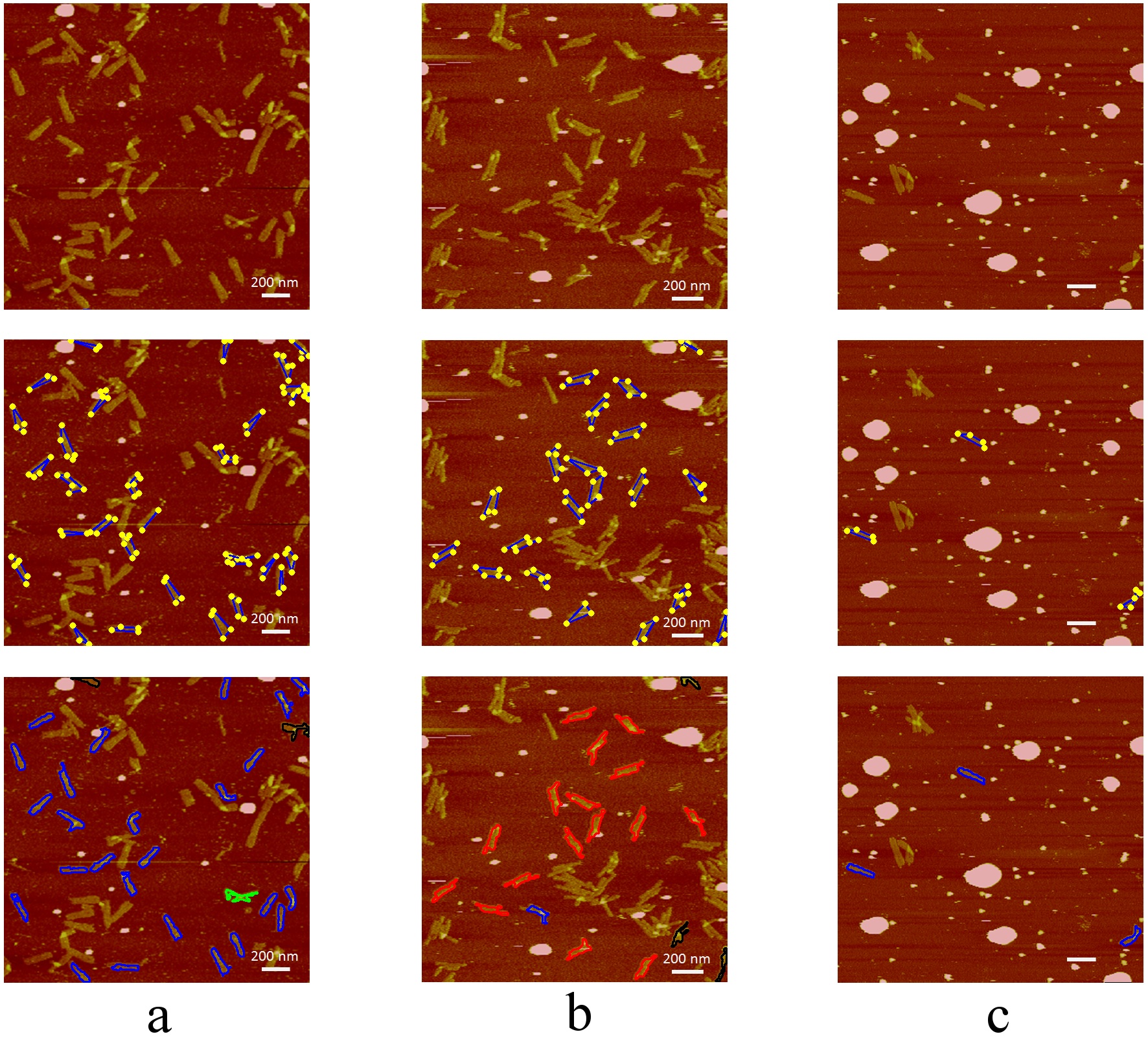
分子机器人是通过折纸技术,利用DNA分子能够构建出二维和三维的物体。但在实际操作过程中,环境的细微变化会造成纳米级别物体的形状的大幅度改动,并进而造成分子机器人以及DNA机器人制作的失败或者性能低下。因此,每一次利用DNA折纸技术制作出纳米级别物体后,都需要对其形状进行仔细观察,以判断其形状是否正常。本研究拟以原子力显微镜(AFM)拍摄出的DNA纳米级别物体为研究对象,提出合适的图像预处理算法;研究DNA纳米级别物体识别算法,使计算机能够自动识别其形状,并标识出目标DNA纳米级别物体;构建描述AFM图像中实际形状和理想形状的差异程度的模型;最终,开发出识别和分析DNA纳米级别物体形状的图像系统。希望通过该研究为我国的DNA机器人的形状控制提供强有力的理论依据和技术支持。
此外,关于分子机器人的运动控制,也正在积极的研究中。
|